一昨日の日曜日。大雨の影響でレースが中止になった鈴鹿サーキットからの帰り道。午後3時ごろの新名神は休日とあって、渋滞はしていないもののそれなりにたくさんのクルマが走っていた。

名神高速を降りて守山市
圧倒的にヘッドライトをつけていないクルマのほうが多い
新名神の写真はない
ワイパーを速いほうにしてもフロントウインドにぶつかる雨粒を拭ききれないほどの強い雨。路面にも水膜がはっているのか前を走るクルマが巻き上げるしぶきがスクリーンのよう。空はねずみ色に暗く、まんま無彩色の世界。あれほど視界が悪かったのはあまり経験がない。
なのに、ヘッドライトを点けていないクルマが多いのに驚く。
なぜ点けないのだろう? 夜じゃないからか? 見にくいけど見えなくはないから点けないのか?

湖西道路でも
点けているのは四分の一ぐらい
ヘッドライトを点けることなど造作ないはずだが
決まりじゃないし、別に点けなきゃいけないことはないけれど、右手を(左手を)ひねるだけでこと足りるのだから、点けてもいいじゃないか?
シルバーのクルマなど、テールライトが点いていないとかなり近づかないと確認できない。バックミラーで見るとしぶきの影響もあって存在が希薄。
スモールライトを点けているクルマもいたが、前を走るクルマからすればヘッドライトのほうが視認性は高い。
運転している本人が大丈夫だと感じていても、運転というものはある種の情報処理作業なわけで、しかも交通の流れに身をおいているのだから、昼間であっても視界が悪いときにはヘッドライトを点けるほうが不確定要素が減らせる。
自分が必要ないと思っても、それが正しいとは限らない。交通には多くのクルマが関わっている。全体から見ればそれぞれの存在が確認できたほうがいい。そして最終的には貴方のためにもなるはずだ。
運転中、何かあってからは遅いのだから、その時、その場面で、何をすべきかにもう少し一生懸命になってはどうだろう。
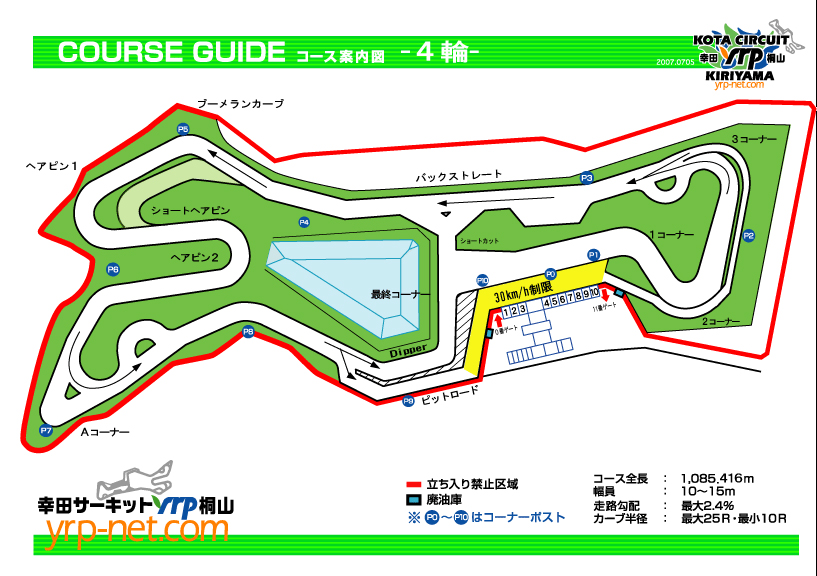
11月10日(金)に愛知県額田郡幸田町にある幸田サーキットで、中部地区初のYRSドライビングスクールを開催します。

幸田サーキット
幸田サーキットは1周1,085m。長いハイスピードコーナーはありません(3速のコーナーは2ヶ所あります)が、次々に現れる形状の異なるコーナーを消化するためにクルマの姿勢をフラットに保つことが求められるコースです。
クルマを思い通りに動かすためには、最初にタイヤのグリップの限界内で操作する必要があります。次に走行中に変化するグリップを最大限に生かすために、姿勢変化をコントロールするための操作が必要になります。そのためにはクルマの過重移動を意識することが欠かせませんが、幸田サーキットのレイアウトはその練習に最適です。
スロットル、ブレーキ、ステアリングの各操作が過不足なく、正確に加速、減速、旋回の挙動に伝えることができればクルマは思い通りに動きます。
その、操作の手続き を身につけるのにうってつけのコースなので開催することを決めました。平日ですが、クルマを速く走らせる前に、意のままに動かしてみたい方はぜひ受講してみて下さい。
・11月10日(金)開催 YRSドライビングスクール幸田 開催案内 & 申し込みフォームへのリンク

ホームストレート

1~2コーナー

バックストレート

ブーメランカーブ

Aコーナー立ち上がり

ピットロード入り口

最終コーナー

ホームストレート
◎
2016年2月に新東名高速道路の浜松いなさジャンクションと豊田ジャンクションが開通してからは利用する機会がなかったのだけど、三河方面に用事があったので久しぶりに伊勢湾岸道路の豊田ジャンクションから東名高速道路に乗り入れた。
ホントに久しぶりに豊田ジャンクション手前の伊勢湾岸で左車線に向かい、新東名と分岐してからしばらく直線を走り、「サーキットでこんなコーナーがあったら面白いだろうな」の回り込んだ右コーナーを横Gを感じながら通過。ステアリングを戻す頃に路面が下り始め、短くない直線を右から合流する東名を走るクルマとの間合いをはかりながら、以前やっていたように東名の流れより速い速度まで加速して合流するタイミングをさがす。
と、まさに合流しようとする地点で異変に気づいた。以前は3車線あった東名高速道路が2車線になっていた。
湖西に拠点を移してから、東名の豊田ジャンクションと音羽蒲郡インターチェンジ間の上りと美合パーキングエリアと豊田ジャンクション間の下りで路肩の工事をしていることには気づいていた。渋滞緩和のために3車線化するのだろうな、と。
2011年だったか、3車線になると車線幅が少し狭くなり、多分高速道路の規格から外れたからだろう制限速度が60キロになったけれど、追い越し車線を占拠する大型トラックが少なくなったので、流れがよどまなくなったしストレスは減ったで、「やればやれるじゃん」と思ったことを覚えている。
それがなんだ! なんで2車線になっているんだ。せっかく利用者のためになっていたのに。 ? マークが頭の中で点滅する。
豊田ジャンクションから東に向かうと微妙なアップダウンがあるから乗用車でも一定速度を維持しにくい。そこを大型トラックが延々と追い越し車線を占有するから、流れは時に60キロになる。あちこちで頻繁にストップランプが点滅する。営業車とおぼしきバンが右に左に車線を変えて先を急ぐは、すきあらば大型トラックが強引に追い越し車線に移動するはで、まさに無法地帯。
3車線の時も第3車線に出てくる通行帯区分違反のトラックはいたが少数派だった。2車線に戻してしまったので、再び速度抑制装置がついている大型トラックに追い越し車線を走る理由を与えてしまった。追い越しが終わっても走行車線に戻らない。車間距離もとらないのだから平均速度が上がるはずもない。

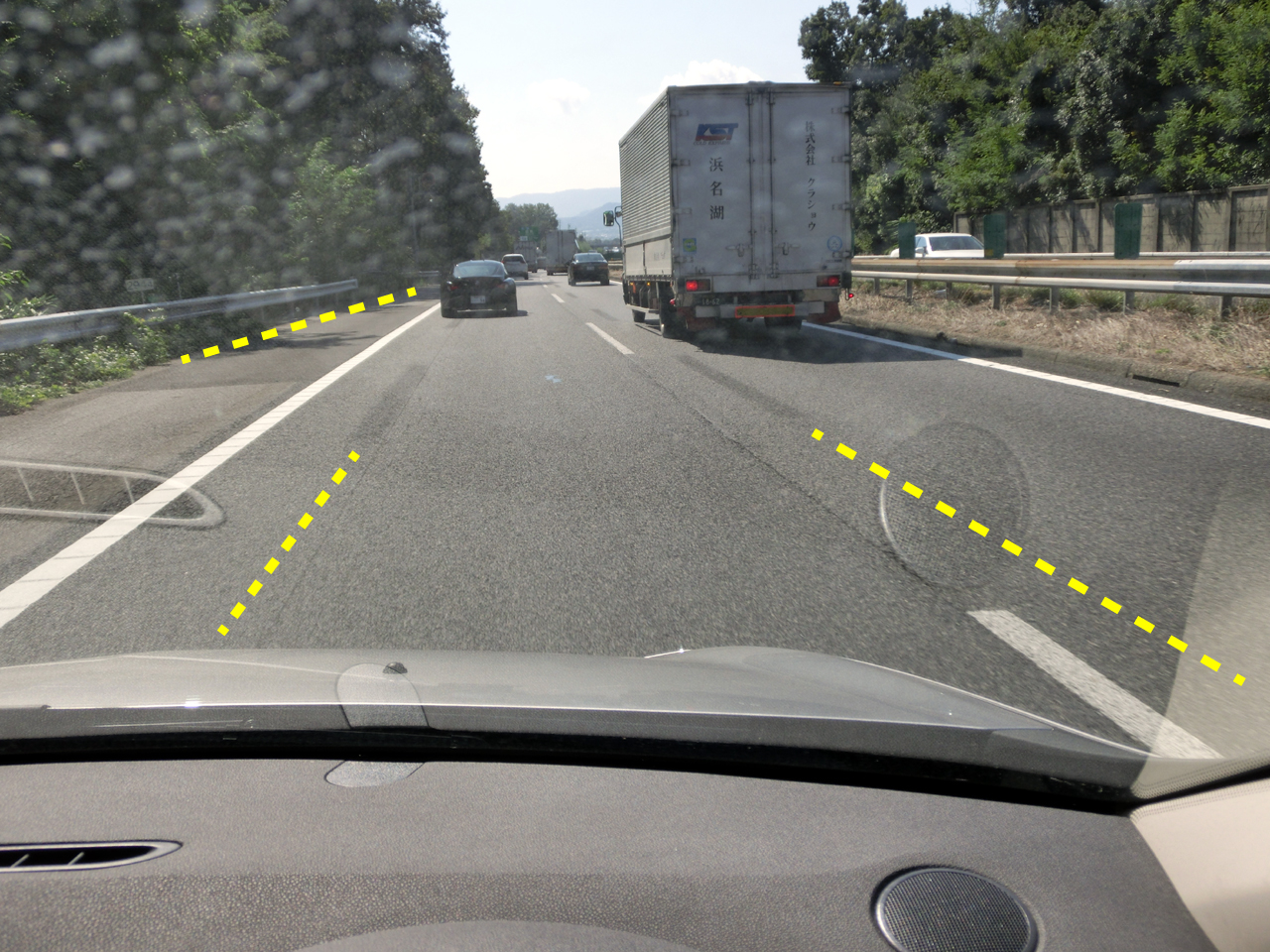
3車線が2車線に戻っていたなんて知らなかった
うっすらと残る白線を消した後の延長線上に黄色の点線を描いてみた
2車線の場合の車線幅は3.6mで3車線だと3.25mだとか
確かに狭いけど走れないわけではない
用事をすませ家に戻ってから調べてみると、あの3車線は暫定3車線だったらしい。渋滞緩和のために3車線化したことには違いはないが、あくまでも暫定であって、2016年2月に新東名の浜松いなさ豊田ジャンクションの開通によりあの区間の渋滞が大幅に減少したため、その年の暮に2車線に戻したという。
渋滞は減ったかも知れないが、2車線に戻しても交通の流れが維持できるか検証したのだろうか。
もともと自動車は生産性を高めるために生まれてきたものではないのか。移動する速度が遅くなれば経済活動の効率は低下する。渋滞が起きるのも、交通の流れが遅くなるのも、移動する自動車の数に対して道路=車線が足りないからだ。3車線を2車線に戻す必要があったとは思えない。
3車線で建設しておきながらポールを立てて2車線として使っている新東名といい、お金をかけて3車線にしてそれなりの効果があったのにまたお金をかけて2車線に戻したり、やっていることがちぐはぐで、日本の道路行政にとって道路工事を増やすことが大切なので、『使い勝手なんか二の次!』 なのではないかとかんぐりたくもなる。
あちこちに道路ができた恩恵を感じつつも、利用者が払う費用が利用者の利益に帰さない形で使われる状況には納得がいかないなぁ。

台風が近づいてくる中で開催したYRSオーバルレース。やはり雨。それもかなりの雨量。
ユイレーシングスクールのモットーはそれなりに、だから、これまでは雨でもYRSオーバルレースを開催してきたけど、ここは発想を転換してスキッドスクールに変更してみてはと諮ったらみなさん賛同してくれた。Yさんが見つけてきたR.S.Monitorで試したいこともあったものだから。
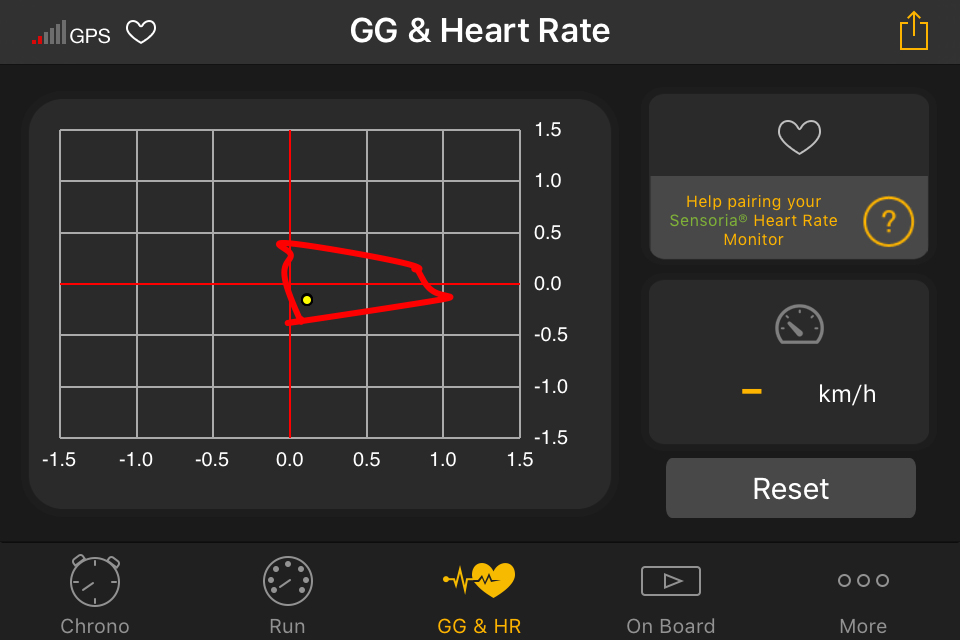
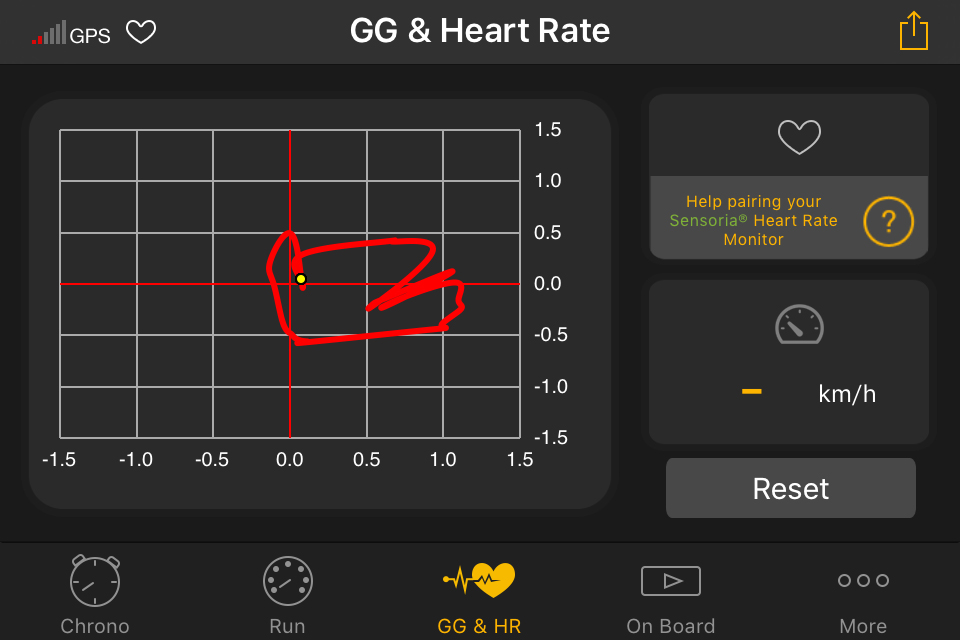
4種類のモードのうちのGモード。Gメーターのようなものでクルマに発生した加速度をグラフにしてくれる。これを使って、『コーナリング中のクルマがオーバーステアになった時に横向き加速度がどう変化するか』を見てみたいと思ったのだ。

写真は左からオープニング画面
Gモードの起動画面
キャリブレーションをしてからスマホを手で振り回して発生した加速度
コーナリング中のクルマが受ける遠心力は、そのクルマが履いているタイヤが発生するコーナリングフォースとバランスする。
速度の低いうちは遠心力が小さいのでタイヤのコーナリングフォースが活躍する場面は訪れないが、理論上は『そのタイヤが発生する最大のコーナリングフォースと釣り合う速度』までコーナリング速度を高めることができる。
だから、速く走るためには前後輪のコーナリングフォースをもれなく使うためにアンダーステアもオーバーステアもダメだよ、ということになるのだけれど、逆にコーナリング中に意図的にオーバーステアにしたら遠心力=横向き加速度=横Gがどうなるかを可視化したかったのだ。

YRSオーバルレース参加者のEさんに頼んでR.S.Monitorを装着
R.S.Monitorは加速度を連続してグラフにする。走り続けると次々にオーバーライトしてしまって何が何だかわからなくなってしまうので、あえてひとつのコーナーをクリアするだけに的を絞って、イーブンスロットルで前後タイヤのコーナリングフォースを均等にする走りと、一瞬リアの過重を抜いてオーバーステアにしてそれを維持する走りを比較した。
案の定
タイヤがグリップしている範囲では
横Gが立ち上がっていて
つまりコーナリングフォースが発生していて
コーナリングが終われば収束する
数値は正確ではないと思うけど雨でも1Gを超えている

コーナリングを始めると横Gが立ち上がるけど
オーバーステアになって
コーナリングを続けるためにカウンターステアをあてると横Gが落ち込む
この場合は顕著なカウンターステアを2回あてているのだろう
つまり、オーバーステアにおちいると高いコーナリング速度を実現するために必要なコーナリングフォースを失うから、結果として、瞬間的にかも知れないけどコーナリング速度が低下する。 だから、「コーナリング中にカウンターステアをあてるような走りは遅いのよ」、「速く走るためには前後輪のスリップアングルが均等なのが理想よ」、「オーバーステアの延長にあるスピンなんかもってのほかよ」という結論を導きだしたかったのだけど、 グラフを見る限り、カウンターステアをあてたままのコーナリングでもヨーモーメントが一定だと高い横Gが発生することがわかった。ただ、トラクションが横に逃げているから速さはスポイルしているはずだ。
協力してくれたEさんの走り





◎