”Go Circuit” 創刊号
バックナンバーの頁から
20年目の活動になる来年。3月まではカレンダーを決定済だけど、何か面白いことができないかなと考える毎日。
初心に戻ってみるかとユイレーシングスクールのメールマガジン”Go Circuit”の創刊号を開いてみた。 『ん~、昔からちゃんとしたことを言っていたんだな』 と妙に感心したりして。
発行は1999年9月1日となっているから、まだアメリカに住んでいて、メールマガジン配信サービスを利用して送信したものだ。 『あぁ、そんな時期もあったね』 と懐かしくなったので全文を掲載。 今さらながら、誰がなんと言おうと、ユイレーシングスクールのボトムラインです。興味のない方はスルーして下さい。
≡≡ Yui Racing School presents ≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡
○○○○○○○○○○○○○ Go - Circuit No.1 (09/01/99)
—————————————————- from California, USA ——
●クルマを走らせるのは楽しい。速く走らせるのはもっと楽しい。●しかし安
全に速く走らせることが難しいのも事実。走らせ方を理解していないと楽しく
もないし危険でさえある。●クルマをもっともっと楽しむために「クルマさん
との正しいお付き合いの仕方」を学びませんか。●当サイトからの提案です。
<<標語>> 公道では安全運転、サーキットではそれなりに。
======================================
◆ はじめまして
トムヨシダです。最近サーキットを走る人が増えていると聞きました。嬉しい
ことです。オジさんもクルマを速く走らせるのが大好きです。でも制約のない
サーキットに行くと上手く走れない人がいるんですネ。なぜだかわかります?
◆ 当レーシングスクールの考えを聞いて下さい。
日本のメディアを見ていると、時々「スピードを出さないことが安全運転につ
ながる」という意見に出会うことがあります。確かに交通事故の多くがスピー
ドの出しすぎに起因することは事実ですが、逆にスピードを出さなければ安全
だという話でもないのです。
むしろ、「スピードを出さないことが安全運転につながる」という考え方が蔓
延すると、「制限速度を守ってさえいれば安全なんだ」という解釈を生む可能
性の方が高く危険ですらあると考えます。そうではないんですヨ。
何百倍もの能力のある機械を非力で間違いを犯しやすい人間が操作するのです
から、クルマを走らせること自体がそもそも非常に危険なことです。事故はど
んな状況でも起きる可能性があります。制限速度以下で走っていても事故は起
きます。スピードに関係なく事故は起きます。ちゃらんぽらんに運転していれ
ば、事故が起きない方が不思議なのです。
事故(もちろんサーキットでの事故も含みます)を防ぐには、正しいクルマの
運転の仕方を身に付けるのが一番効果があります。洗濯機やコンピュータの扱
いを間違っても人間が傷つくことはまれですが、クルマの場合は動かすことに
既に危険をはらんでいるからです。
サーキットを走っている人やこれから走ろうという人は運転が好きで、比較的
運転に自信があると思います。ただ町の中には運転がきらいだけどしょうがな
く乗っている人や、運転に自信のない人も走っています。クルマを運転する人
全てが運転に興味を持ち自分の運転を見直すことができれば交通事故は減ると
思うのですが、そうもいきません。ぜひ町の中では運転に関しては後輩の面倒
を見てあげて下さい。そしてサーキットでこそ、君自身の限界に挑戦して下さ
い。応援します。
--------------------------------
◇ 最初に
サーキットに限らず町中でも、クルマの運転には守らなければならないルール
があります。基本的なものは、1)スムースに運転することと、2)状況に応
じて運転することです。
読者の中にも同乗者から「アンタの運転は恐い」とか「まわりを見て運転して
いない」といわれたことのある人もいるのではないですか。
まずスムースに運転すること。なぜ必要なのかと言うと、クルマは運転する人
間よりずっとずっと図体が大きく重いからです。君がこうしよう、こうしたい
と考えて操作してもクルマが反応しないことがあります。それはクルマの責任
ではなく君が「クルマさん」の事情も考えずに一方的に行動しようとするから
です。<どこかに同じような例がありましたっけ>
状況に合わせた運転も重要です。サーキットだけでなく町中を走っていてもオ
ットットとなった経験があるでしょう。それは状況の把握が足りないのではな
くて、君が見込みで(確信がないのに)運転しているからです。何かあってか
ら「こんなはずじゃなかった」とか「クルマがねェ・・・」という人がいます
が、それはその人が「そうなるはず」、「こうなるはず」で運転しているから
です。クルマの運転は連続操作です。刻一刻と変わる状況に常に反応して運転
する必要があります。
どうでしょう。思い当たるフシはありませんか。そう、ふたつとも運転手の身
勝手から起きているのですネ。
実際には君が運転するわけですけど、本当のところは「クルマさん」が走って
くれているんですヨ。ここが大事。つまり運転するということは、教習所では
教えてくれなかったかも知れませんが、実はクルマさんとの共同作業だったわ
けです。ですから、一人よがりはいけません。授業が進む前に、君の「クルマ
さんとの付き合い方」がどうだったか思い出してみて下さい。
レーシングテクニックは1)スムースな、2)状況の変化に対応できる運転の
上に成り立ちます。サーキットに行かなくても、あるいは食事をしている間に
でも運転が上手くなる「安全に速く走るための秘伝」(?)を掲載しておきま
す。これは
ユイレーシングスクール教科書の4頁
でも読むことができます。
--------------------------------
◇ 秘伝「安全に速く走る」
運転手がどんなに頑張って速く走ろうとしても、絶対にクルマさんの性能以上
には速く走れない。
速く走るためには、クルマさんが性能を発揮しやすい状況を運転手が作れ。
運転手が速く走ろうとあがいてみても、クルマさんの意向にそっていなければ
速くは走れない。
速く走るのはクルマさん。運転手までもが速い操作(慌てた操作、雑な操作)
をする必要はなし。
クルマさんは人間よりずっと重い。小回りが聞かないのは当たり前。運転手の
操作とクルマさんの反応には時間的なズレがある。クルマさんは自分の手足で
はない。
サーキットを走る場合、クルマさんを振り回して楽しむのか、それともクルマ
さんとの共同作業で(自分の)限界に挑戦するのか、はっきりとどちらかに決
めろ。
ラップタイムを基準に速く走るのが目的とするならば、ドライバーの操作は必
要最低限に限れ。
速く走るためには、クルマさんが性能を発揮しやすい「直線」を重視した走り
を組み立てろ。
タイヤのおいしいとことろを存分に使わせてもらうためには、ブレーキングは
できるだけ直進状態で行い、コーナリングはイーブンスロットル(加速も減速
もしない状態)で行え。
直進状態でのフル加速とフルブレーキング以外、サーキット走行は常に妥協(
折り合い)の連続。加速する、曲がる、止まるの3要素を瞬間瞬間にどう妥協
させるか常に気を配れ。
失敗したらすなおに非を認めろ。テクニックがないのにミスをリカバリーしよ
うとするとしっぺ返しを食らう。
クルマさんが不安定になるのは運転手の操作が間違っている場合がほとんどだ
。自分のミスをクルマさんのせいにするナ。
———————————————————————————————–
◆ どうですか?
創刊号を読んでみて、何か思うところがありましたか?
ない? それは「クルマが速く走るのは俺が上手いからだ」と思い込んでいるか
らでしょう。そうじゃないですヨ。「クルマが速く走ることができるのは、君
のすることをクルマさんが理解できる場合に限る」ことをお忘れなく。
クルマの運転はそれほど複雑な操作が必要なものではありません。ですから余
計に大切なところを見落としている場合が多いのです。安全に速く走るために
は練習も必要ですが、練習時間が多ければいいってもんじゃありません。クル
マに乗る時間、いやそれ以上の時間を「運転の仕方を考える」ことに費やすこ
とのほがよほど重要です。(お金はかからないしネ)
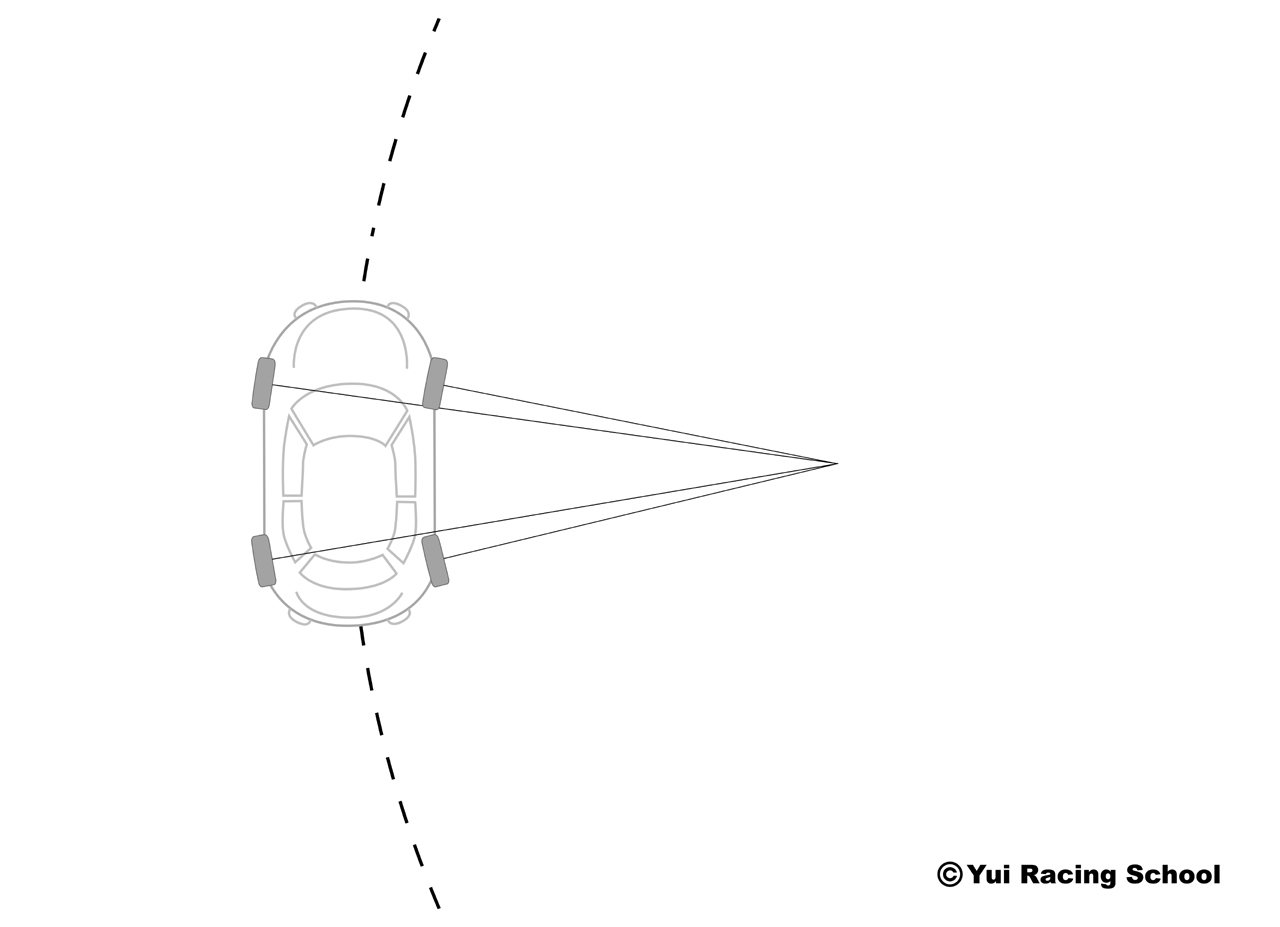
イメージトレーニングに役立つように、
ユイレーシングスクール教科書の13頁
に各種の左コーナーの図を掲載してあります。自分がいつも「どこで何をやっ
ていたか」を思い出してみて下さい。速さと安全は、あくまでも理論的な走り
ができて達成することができます。
* * * * * * * * * * * * * * *
さぁ、次号からは徐々に具体的なテクニックに触れたいと思っています。君が
知らなかった速く走るコツやヒントが山盛りになって出てきます。
それでは、今日も安全運転を! サーキットで会いましょう。
**************************************** 奥付け ******
Mail Magazine ” Go - Circuit ”
発行元:AVOC Fountain Valley, CA 92708 USA
発行人:トムヨシダ
投書宛先:publisher@avoc.com
オリジナルサイト:http://www.avoc.com
– – – – – – – – – – – – – – – – – – – – – –
ユイレーシングスクールhttp://www.avoc.com/ の創
刊号として、このメールマガジンは発行されています。
– – – – – – – – – – – – – – – – – – – – – –
このメールマガジンの登録・解除、バックナンバーの閲
覧は、http://www.avoc.com/mm/intro2 で行えます。
—————————————————————-
このメールマガジン(ID:0000016855)は、インターネットの本屋さ
ん『まぐまぐ』を利用して発行しています。( http://www.mag2.com/ )
≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡≡ Presented by Yui Racing School≡